With new material management, we have added also normal maps. Normal mapping is a technique used for faking the lighting of bumps and dents in 3D models – an implementation of bump mapping.
It is used to add details without using more polygons. Which means you can create smaller and faster models for 3D Wayfinder. Normal maps will enhance the appearance and details of a low polygon model by generating a normal map from a high polygon model or height map.
Here is an old town model without normal map:

In following screenshot is the same model with normal maps applied:

The result will look like the stones are all modeled out in 3D.
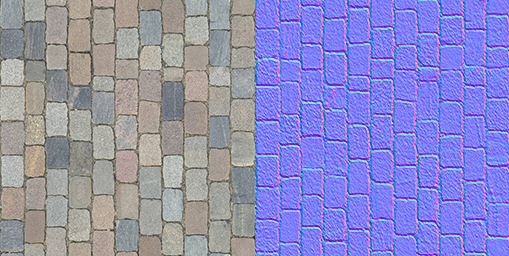
Here is the texture and normal map added to this texture:
To use normal maps, you have to select “Normal-mapped” for the material from the shader column.
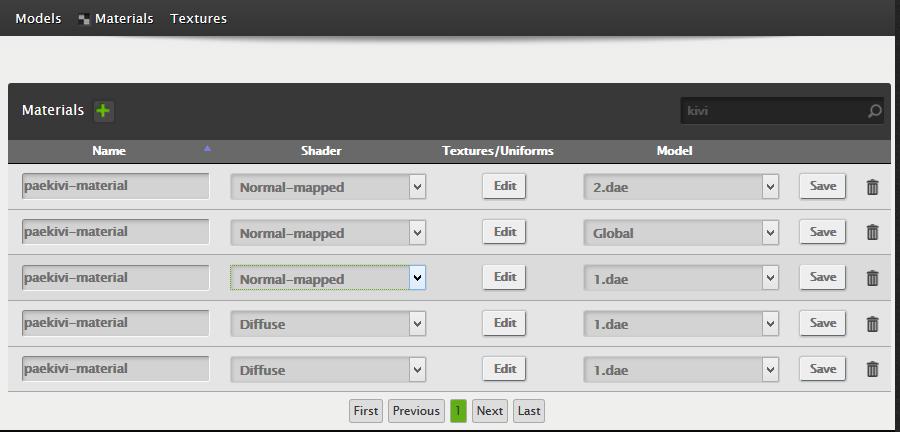
Then press “Edit” and you can upload texture and normal map image:




